Kubernetes Storage 101: 浅谈如何实现一个 CSI 插件
Table of Contents

话接上回 《Kubernetes Storage 101: 浅谈 K8s 存储概念,解锁数据驱动的力量》,在之前的文章中我们共同探讨了 K8s 存储概念的基础知识,为我们的学习之旅奠定了坚实的基础。
现在,我将继续和大家聊一聊关于 K8s 存储的一个重要组成部分:Container Storage Interface (CSI)。
在接下来的内容中,我们将会了解到 CSI 的工作原理、核心概念以及如何将其集成到你的容器化环境中。


为什么需要 CSI ?它解决了什么问题?#
在学习 CSI 之前,了解其产生的背景以及它能够解决的问题我觉得是很有必要的。
为什么需要 CSI#
虽然 Kubernetes 平台它本身支持了非常多的存储插件,但是毕竟也是有限的,永远无法满足用户日益增长的需求,比方说有客户要求我们的 Paas 平台必须接国产的存储怎么办?
面临的问题,如何做集成?#
Kubernetes 本身提供了一个强大的 Volume 插件系统,最直接的方式就是向这个 Volume Plugin 增加新的插件。
但是,想必大家也知道 Kubernetes 太复杂了,它有一定的学习曲线,这样做一来成本比较高,再者直接集成第三方代码,可能会对 Kubernetes 平台系统的可靠性和安全性产生隐患。
另外,这种方法它也不方便测试和维护,比方说第三方存储服务如果有变更,我们就需要提交变更代码到 Kubernetes,等待 Code Review。
换句话说,我们必须要等到 Kubernetes 发布才能将存储服务的变动上线,这就意味着存储的集成与 Kubernetes 的发布周期捆绑在一起了。
所以直接和 Kubernetes 做集成是非常不方便的。
让我们重新回过来看下, 上面反复提到过的 In-Tree 和 Out-Of-Tree 这两个概念,我相信从字面意思上大家都已经理解了,再结合下面这张表格,大家心里是否都已经有了答案?

解决了什么痛点?#
CSI 将三方存储代码与 K8s 代码解耦,不同的存储插件只要实现这些统一的接口,就能对接 K8s,用户无需接触核心的 K8s 代码。
最重要的是,CSI 规范是现在业界容器编排统一的存储接入标准。

那么,什么是 CSI?#
以下是 ChatGPT 给出的回答:
CSI(Container Storage Interface) 是一个规范化的接口,用于容器编排引擎与存储供应商之间的通信。它允许存储供应商编写标准的插件,以便容器编排引擎可以与其集成,从而实现更加灵活和可扩展的存储解决方案。
CSI 驱动器由三个主要组件组成,每个组件都扮演着特定的角色:
- Node Service: 运行在每个 Kubernetes 节点上,负责在节点上挂载和卸载存储卷,并处理节点级别的存储操作。
- Controller Service: 运行在 Kubernetes 控制平面中,负责管理存储卷的生命周期,包括创建、删除和扩容等操作。
- Identity Service: 它是 CSI 驱动器的第三个组件,它在 CSI 驱动器注册时提供标识信息,并向 Kubernetes 集群公开驱动器的支持能力。它负责告知 Kubernetes 驱动器的存在,提供驱动器的基本信息和功能支持。
CSI 的设计思想是将存储管理和容器编排系统解耦,使得新的存储系统可以通过实现一组标准化的接口来与 Kubernetes 进行集成,而无需修改 Kubernetes 的核心代码。
CSI 驱动器的出现为 Kubernetes 用户带来了更多的存储选择,同时也为存储供应商和开发者提供了更方便的接入点,使得集群的存储管理更加灵活和可扩展。
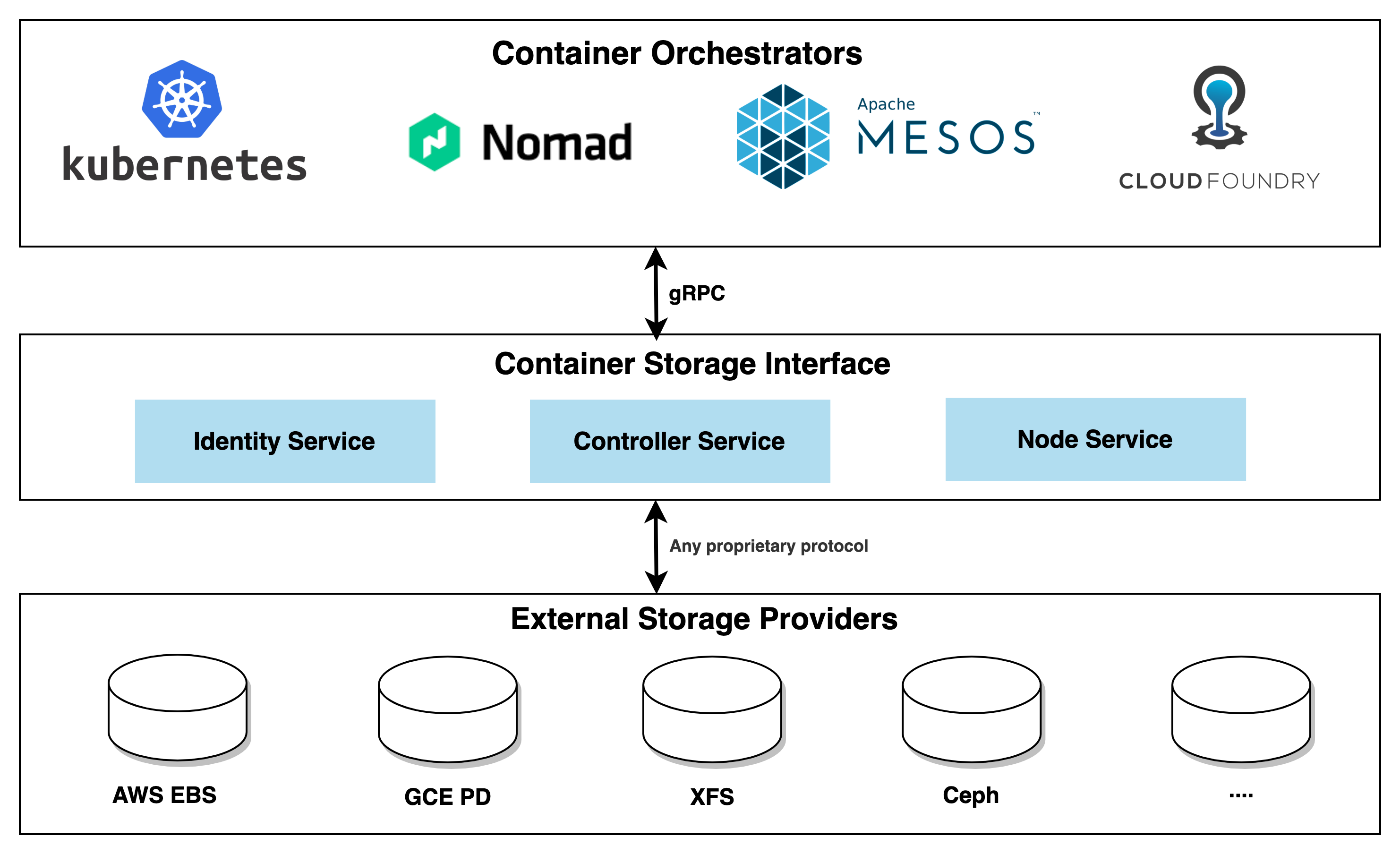
CSI 适配工作是由容器编排系统(CO)和存储提供商(SP)共同完成的,CO 通过 gRPC 与 CSI 插件进行通信。相信大家也都观察到了,CSI 在这里充当了连接的纽带,上层连接容器编排系统,下层操作三方存储服务。
CSI 的工作原理,它是如何工作的?#
Typical CSI driver architecture#
下面是 CSI 的一个典型架构,虽然 CSI 对于存储提供商来说只要实现三个模块即可,但是整个编排流程可以说是相当复杂的。
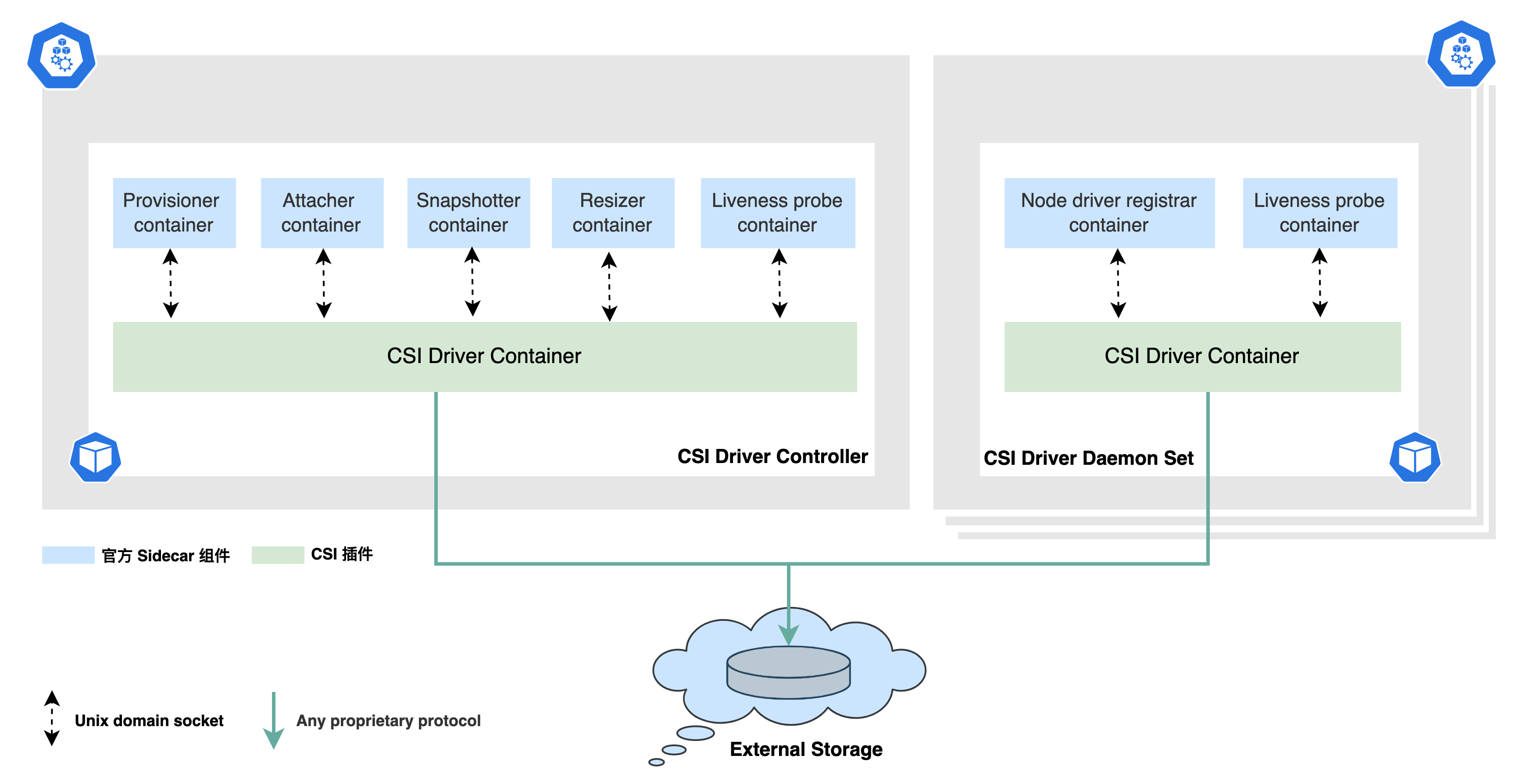
CSI 的整个运转流程会涉及到两方面的组件:
- 由 Kubernetes 官方维护的一组标准 external 组件,他们主要负责监听 K8s 里的资源对象,从而向 CSI Driver 发起 gRPC 调用,详见:
Kubernetes CSI Sidecar Containers。它们是与 CSI 驱动器一起部署在同一个 Pod 中,用于辅助 CSI Driver 完成一些额外的任务和功能。
- 各存储厂商开发的组件(需要实现 Identity Service,Controller Service,Node Service)
我们来看下左边的 CSI Driver Controller 部分,它是通过多个 Sidecar 组件配合第三方实现的插件(Controller Service)来完成的。
正如上面提到的,它负责管理存储卷的生命周期,包括创建、删除和扩容等操作。换句话说,我们的存储厂商能够提供什么样的能力,部署 Controller 的时候,就需要提供与之对应的 Sidecar 容器一起部署。
好比说我的 CSI Driver 只提供了 Dynamic provisioning 的能力,其他能力的接口我都没实现,在控制器部署的时候,我只需要将 external-provisioner 和我的 Controller Service 部署在一个 Pod 即可,组件的选择完全取决于三方的实现。
Kubernetes CSI Sidecar Containers#
#1. external-provisioner#
external-provisioner 是一个 Sidecar 容器,用于在 Kubernetes 中动态地创建和删除外部存储卷。
当一个新的 PVC (PersistentVolumeClaim) 被创建时,external-provisioner 会向外部存储系统发起请求,以创建相应的存储卷,并将其与 PVC 关联,从而满足 Pod 对持久化存储的需求。
external-provisioner 实际上会执行检查,以验证 PVC 中是否存在注解 volume.kubernetes.io/storage-provisioner,并且该注解的值是否与 CSI 驱动程序的名称相匹配。整个流程贯穿了 PV Controller 这个组件。
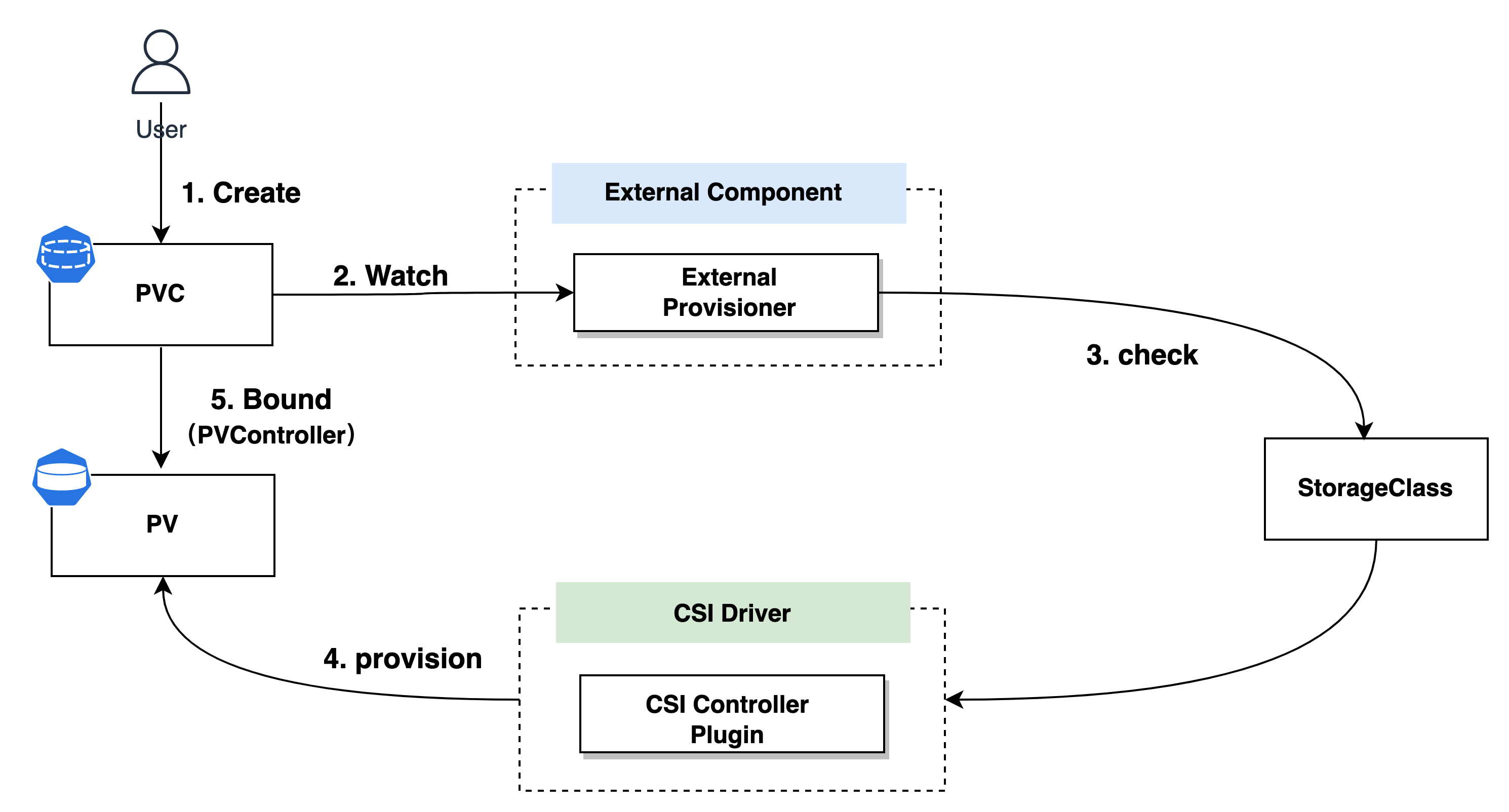
这里涉及到的两个操作分别对应着 Controller Service 中的 CreateVolume 和 DeleteVolume 两个接口的实现,它们的调用者正是 External Provisoner。
这一流程的核心是,external-provisioner 充当了中间人,通过 Kubernetes 的 PVC 和 StorageClass 机制,将 Pod 的持久存储需求传递给外部存储系统。这使得存储卷的创建和管理能够无缝集成到 Kubernetes 集群中,为应用提供了持久性的存储解决方案。
思考#
假设每个 PVC 背后对应的 Volume 都需要独立加密,并且加密密钥也各不相同,PVC 的 Spec 中已经没有额外的参数来提供这些信息了,那么我们如何将这些加密密钥传递给 CSI 接口呢?
这里有必要提一下 CSI Operation Secrets 这个概念,它允许针对每种不同的 CSI 操作定制不同的 Secret,并且通过 StorageClass 与之配合使用。
让我们来看下面这个 StorageClass 的定义作为例子:
apiVersion: storage.k8s.io/v1
kind: StorageClass
metadata:
name: xfs2-sc-4-per-volume
provisioner: xfs2.csi.basebit.ai
parameters:
csi.storage.k8s.io/provisioner-secret-name: ${pvc.name}
csi.storage.k8s.io/provisioner-secret-namespace: ${pvc.namespace}
需要关注的是 parameters 字段中的 csi.storage.k8s.io/provisioner-secret-name 字段的值,它使用了变量 ${pvc.name}。怎么理解呢?
具体而言,当我们使用 ${pvc.name} 作为 csi.storage.k8s.io/provisioner-secret-name 参数的值时,每次创建 PVC 后,都可以为它创建一个对应的 Provisioner Secret,并将该 PVC 的名称作为 Provisioner Secret 的名称。
这样,每个 PVC 都会拥有一个唯一的 Provisioner Secret,用于身份验证和认证。Secret 的具体定义取决于每个 CSI 驱动器的实现。在针对创建存储卷的场景中,CreateVolumeRequest 可以获取到 Secret 的详细信息。
这种参数化技术是 Kubernetes 中允许的一种灵活方式,可用于在运行时动态生成配置文件
provision、delete、expand、attach 和 detach 等操作通常也需要 CSI 驱动程序在存储后端使用凭证,后面就不再多做赘述了。
如需了解更多高级用法,请参考文档: StorageClass Secrets
#2. external-attacher#
external-attacher 是一个 Sidecar 容器,其作用是在 Kubernetes 节点上动态地进行外部存储卷的 挂载(Attach) 和 卸载(Detach) 操作。
它是通过监听 Kubernetes API Server 中的 VolumeAttachment 对象,来触发 Controller Service 中的 ControllerPublishVolume 和 ControllerUnpublishVolume 两个接口调用。
然而,并不是所有情况下都需要使用 attach/detach 操作,尤其是在一些分布式文件系统的 CSI 驱动程序中,这样的操作可能并不适用。因此,可以说 attach/detach 是一项可选的特性。
#3. external-resizer#
external-resizer 是一个 Sidecar 容器,用于调整外部存储卷的大小。
当 PVC 的存储需求发生变化时,external-resizer 可以根据需求调整外部存储卷的大小,确保存储资源得到最优的利用。
它会调用 Controller Service 中的 ControllerExpandVolume 接口。
#4. external-snapshotter#
external-snapshotter 是一个 Sidecar 容器,用于实现外部存储卷的快照功能。
它是通过监听 Kubernetes Snapshot CRD 对象,来触发 Controller Service 中的 CreateSnapshot 和 DeleteSnapshot 两个接口调用。
它负责在外部存储系统上创建、删除和管理快照,以便于实现数据备份、恢复和复制等功能。
思考#
这玩意儿有什么用呢?VolumeSnapshot 允许在 Kubernetes 集群中创建卷的快照,这些快照可以用于数据备份和应用程序恢复。当应用程序出现故障或数据损坏时,我们可以使用先前创建的快照来还原应用程序的状态。
apiVersion: v1
kind: PersistentVolumeClaim
metadata:
name: redis-data-my-redis-master-0
spec:
dataSource:
name: my-server-snapshot-0
kind: VolumeSnapshot
apiGroup: snapshot.storage.k8s.io
accessModes:
- ReadWriteOnce
resources:
requests:
storage: 2Gi
#5. liveness-probe#
liveness-probe 是一个 Sidecar 容器,用于监控 CSI 驱动程序的运行状况,并通过 Liveness Probe 机制向 Kubernetes 报告。
如果驱动器出现故障或停止响应,Kubernetes 将重启相关的 Pod(Controller Service/Node Service) 以确保服务的可用性。
有关具体的用法和配置示例,可以参考 这里 的说明文档。
思考#
实际上 livenessProbe 是通过 CSI 驱动程序在容器上设置的。 liveness-probe sidecar 容器的主要作用是提供了 /healthz 这个 HTTP 端点。
它背后 checkProbe 最终向 CSI 驱动程序的 Identity Service 中的 Probe 接口发起调用,用来检测插件是否处于健康状态。
这种架构使得插件的健康状态检查与应用程序分离,通过 CSI 驱动程序的 Probe 接口进行通信。
事实上 Kubernetes 从 v1.23 开始具有内置 gRPC 健康探测,已经不需要这么麻烦了。
#6. node-driver-registrar#
node-driver-registrar 是一个作为 Sidecar 容器运行的组件,其主要职责是通过直接调用 CSI 驱动程序的 Node Service 中的 NodeGetInfo 接口,获取驱动程序的信息。
然后,它会利用 kubelet 的插件注册机制,将这些驱动程序的信息注册到相应节点的 kubelet 中。
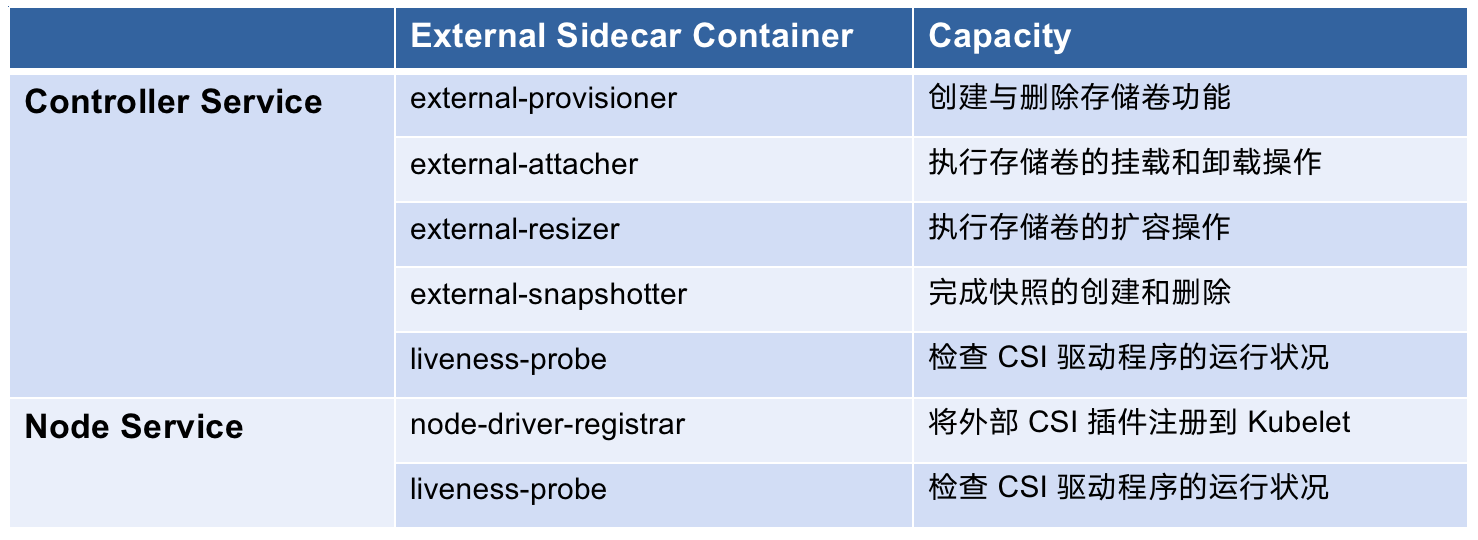
小结#
我们需要记住这张能力关系组合表,它对部署 CSI 驱动程序和排查问题非常的有用。
如何实现一个 CSI 插件?#
要实现一个 CSI 驱动程序,确实只需要完成一系列接口的实现即可,但仅仅完成这些接口的实现还不足以构建一个稳健、可用的 CSI 驱动程序,构建一个稳健的驱动程序还需要考虑方方面面。
CSI Plugin components#
下面是每一个 CSI 驱动程序要实现的接口清单。
其中 Identity Service 负责提供 CSI 驱动程序的身份信息,Controller Service 负责 Volume 的管理,Node Service 负责将 Volume 挂载到 Pod 中。
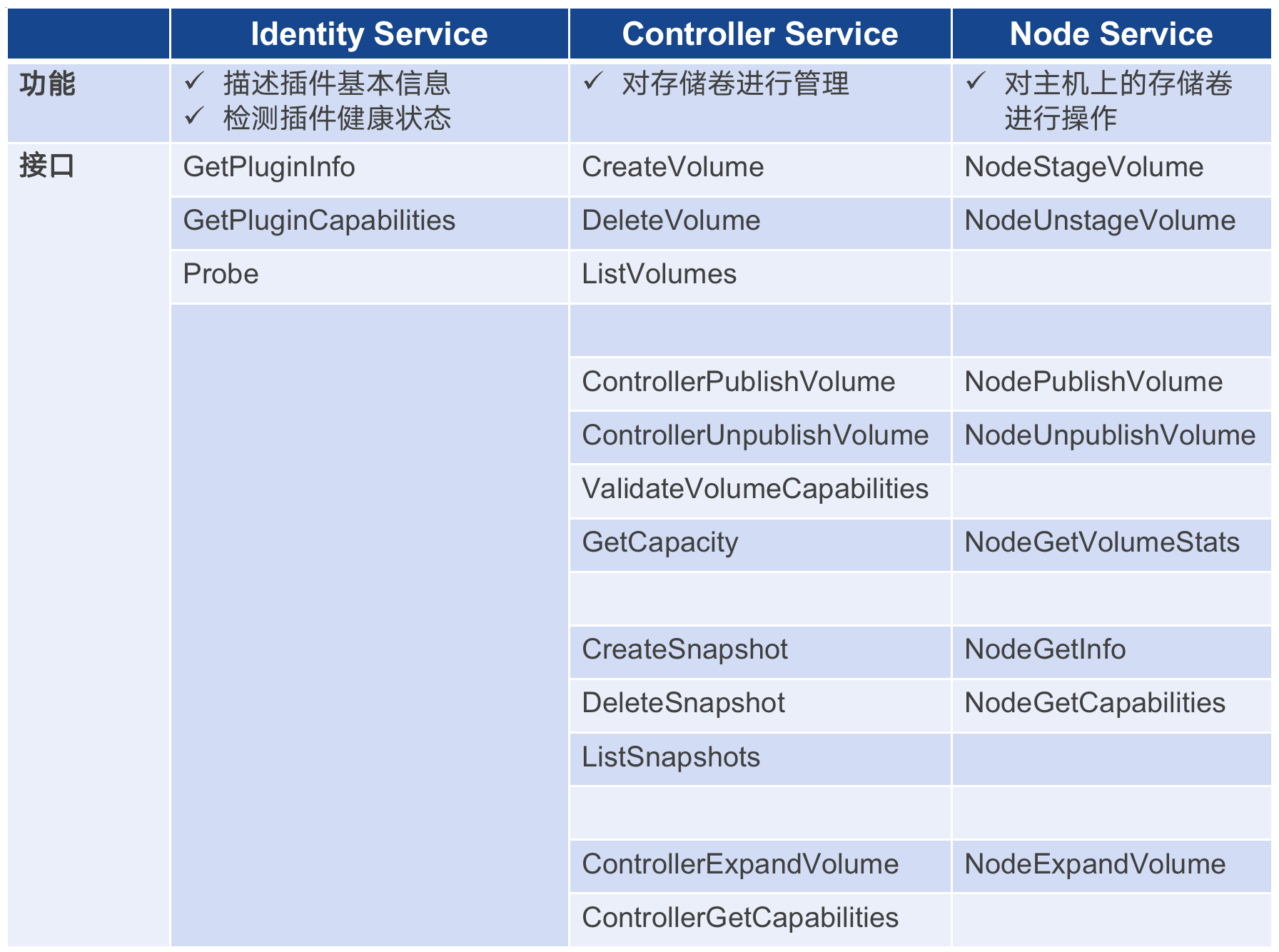
正如前面提到的,一个 CSI 驱动程序能提供什么样的能力,取决于各自存储厂商的实现,三个组件都有对外暴露能力的接口,比如
- Identity Service 中的
GetPluginCapabilities方法,表示该 CSI 驱动程序主要提供了哪些功能。 - Controller Service 中的
ControllerGetCapabilities方法,实际上告诉 K8s,CSI 驱动程序具备哪些能力。这些能力可以包括卷的创建、删除、扩容、快照等操作。 - Node Service 中的
NodeGetCapabilities方法,提供 Node plugin 的能力列表。
CSI lifecycle#
在通常情况下,每个 Volume 都会经历完整的生命周期过程。
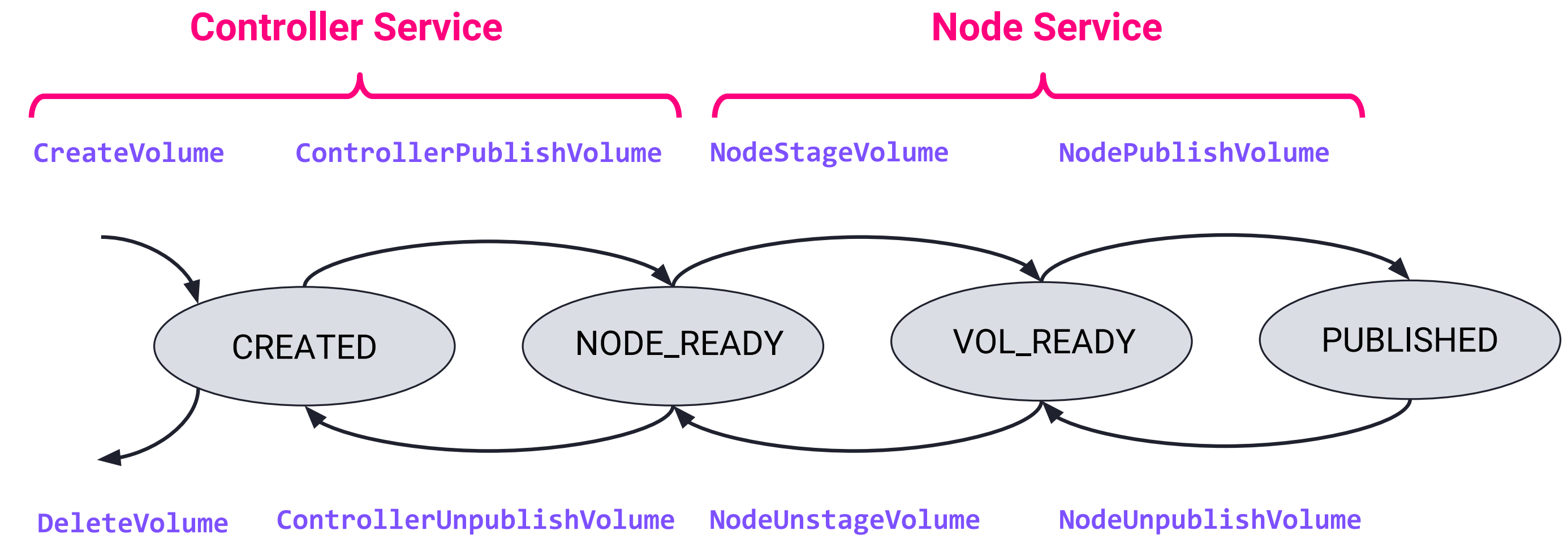
从创建 PersistentVolumeClaim(PVC)开始,接着被 Pod 所使用,这个过程包括三个主要阶段:Provision -> Attach -> Mount。
随后,从 Pod 开始被删除,直到 PVC 被删除,整个过程又经历了另外三个关键阶段: Unmount -> Detach -> Delete。
然而,存在一种特殊的存储卷,它就是 Ephemeral Inline Volumes,它可以通过改变 CSIDriver 的规范中的 volumeLifecycleModes 参数来改变其生命周期。
apiVersion: storage.k8s.io/v1
kind: CSIDriver
metadata:
name: xfs2.csi.basebit.ai
spec:
...
volumeLifecycleModes:
- Ephemeral
Ephemeral 模式表示存储卷是临时的,会随着 Pod 的生命周期结束而被释放。对于这种类型的存储卷,Kubelet 在向 CSI 驱动请求卷时,只会调用 NodePublishVolume,省略了其他阶段(例如 CreateVolume、NodeStageVolume)的调用。而在 Pod 结束需要释放存储卷时,只会调用 NodeUnpublishVolume。
具体的 Pod 规范如下所示:
kind: Pod
apiVersion: v1
metadata:
name: my-csi-app
spec:
containers:
- name: my-frontend
image: busybox
volumeMounts:
- mountPath: "/data"
name: my-csi-inline-vol
command: [ "sleep", "1000000" ]
volumes:
- name: my-csi-inline-vol
csi:
driver: xfs2.csi.basebit.ai
volumeAttributes:
foo: bar
这里的 volumeAttributes 用于指定驱动程序需要准备的卷的属性。这些属性在每个驱动程序中都是特定的,没有标准化的实现方法。
Ephemeral 使用案例#
Secrets Store CSI Driver允许用户将 Secret 作为内联卷从外部挂载到一个 Pod 中。当密钥存储在外部管理服务或 Vault 实例中时,这可能很有用。
Cert-Manager CSI Driver 与 cert-manager 协同工作, 无缝地请求和挂载证书密钥对到一个 Pod 中。这使得证书可以在应用 Pod 中自动更新。
通过这个特性,再一次说明了我们并不要求所有的接口都需要实现,取决于插件实现方提供什么样的能力,我们再去实现相应的逻辑即可。
CSI idempotent#
我们应该确保所有的 CSI 操作都是幂等的,这意味着同一操作被多次调用时,结果始终保持一致,不会因为多次调用而导致状态变化或产生额外的副作用。
这种幂等性是保证系统稳定性和一致性的关键因素。
举个例子,假设我们做一个 DeleteVolume 的操作,如果底层的 Volume 已经不存在了,依然不能报错。无论是第一次执行 DeleteVolume 还是多次重试,操作的最终结果都应该是相同的。
这里不得不提一下 CSI Sanity Test,它可用于验证 CSI 驱动程序的基本功能和稳定性。它会模拟不同的错误和异常情况,例如创建已存在的卷、卸载不存在的卷等,以验证驱动程序对这些情况的处理是否正确。
它对开发 CSI 驱动程序非常的有帮助,可以帮助开发人员快速定位和修复常见问题,减少在生产环境中出现意外问题的可能性。
官方文档中详细阐述了规范(Container Storage Interface,CSI)的内容,同时还提供了与开发相关的注意事项。
这些注意事项涵盖了规范中的一些关键要点,以及在开发过程中可能会遇到的挑战和解决方案。
我们可以在 Container Storage Interface (CSI) Specification 找到这些详细信息。
如何部署 CSI?#
标准的 CSI 驱动程序部署架构如下图所示,其中包括一个由 DaemonSet 运行的 CSI Node 组件,以及一个运行在 StatefulSet 内的 CSI Controller 组件。
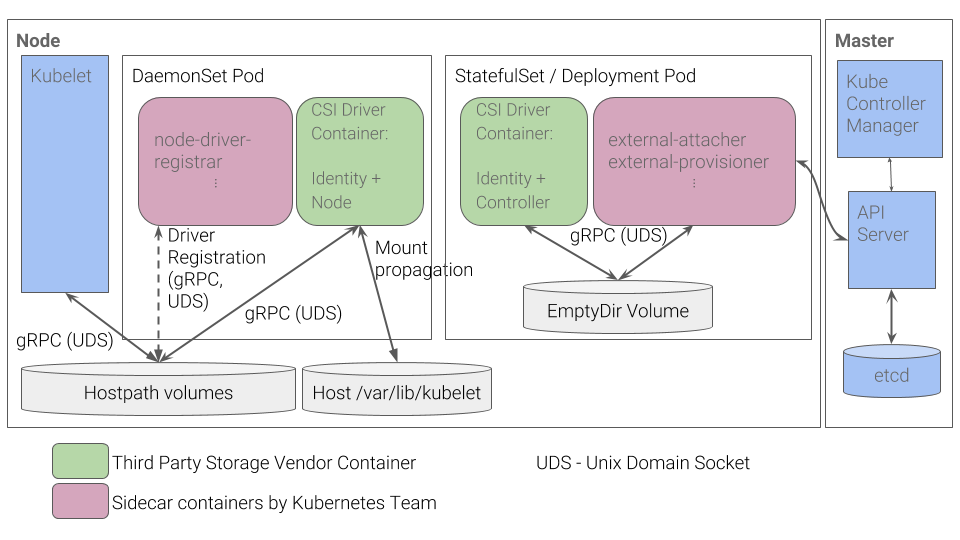
在部署 CSI Node 时,需要将宿主机上的 kubelet 目录(/var/lib/kubelet)挂载到驱动程序的容器内,且需将 Mount Propagation 设置为 Bidirectional。这样,驱动程序容器内的后续 Mount/Umount 操作能够传播到宿主机上。
请注意,这只是一个高层次的架构概述,具体的实施细节可能会因不同的 CSI 插件和环境而有所变化。
CSI 在集群部署成功后,可以用以下两个命令来做下检查:
#1. 查看集群内安装的 CSI Driver
➜ kubectl get csidrivers
#2. 列出哪些节点具有 CSI
➜ kubectl get csinodes
总结#
CSI 是 Kubernetes 存储体系中的核心组件,为存储供应商提供了灵活且可扩展的集成方式,也为 Kubernetes 用户提供了高效稳定的存储解决方案。
通过标准化容器编排器与存储供应商之间的接口,CSI 构建了一种统一的范式,确保所有与 CSI 兼容的存储系统都遵循相同的实现规范。事实上,通过编写一个 CSI 驱动程序,我们不仅为 Kubernetes 存储架构增添了新的维度,还深化了对存储资源管理的理解。
下一期,我将继续与大家分享在实际工作中使用 CSI Driver 遇到的问题和挑战。
一些资料#
